After my Performance Tips and Tricks series I got a lot of requests to write a post regarding the performance on the Xbox 360 platform. I will try to focus on why Xbox 360 is slower than PC and what we can do to get around it. But first we need to underline the importance of good programming. Algorithms and datastructure complexity I’ve been on the topic of complexity before . I can’t underline how important it is that we keep the complexity of our algorithms low. If you are sorting a large dataset, make sure you use the correct algorithm and if you are sorting a small dataset (<10 items), there is another and faster algorithm. Note: If you use .Net List<T>.Sort() , it automatically chooses the best algorithm depending on your dataset. If you are using pixel perfect collision detection, perhaps you should implement a physics system that uses a polygon collision system instead. You could also implement a broad phase system to filter out collisions that you don’t nee...
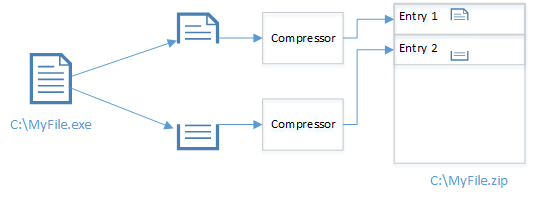
I often find myself needing a compression library in a software development project, and after a few tests with disappointing results I usually fall back to spawning 7Zip as an external process. This time however, the application specification prohibits any data written to disk, which 7Zip needs to do in order to work correctly. I needed to do everything in memory, and so I had to test some of the C# libraries available for compression as well as the different compression algorithms. Here is a full list of the tested libraries: .NET DeflateStream ICSharpCode SharpZip Zlib.NET DotNetZip Managed LZMA LZMA SDK QuickLZ Compression 101 Before I get to the results of the benchmark, I think it is important to understand the different archive formats and compression algorithms in order to compare the results with other benchmarks/and or tests. Lets get to it! A compression algorithm can be compared to a small machine that takes in some data, do some math on it and...
Just for note keeping, I've written down some methods of reducing the size of a .NET Core application. I thought others could use it as well, so here you go. Original Size First off, let's see how much disk space a self-contained 'hello world' application takes up. > dotnet new console > dotnet publish -r win-x86 -c release Size: 53.9 MB - yuck! Trimming Microsoft has built a tool that finds unused assemblies and removes them from the distribution package. This is much needed since the 'netcoreapp2.0' profile is basically .NET Framework all over again, and it contains a truckload of assemblies our little 'hello world' application don't use. > dotnet new console > dotnet add package Microsoft.Packaging.Tools.Trimming -v 1.1.0-preview1-25818-01 > dotnet publish -r win-x86 -c release /p:TrimUnusedDependencies=true Size: 15.8 MB Much better! Although, we have only removed unused assemblies - what about unused...

Comments
Post a Comment